| 海半球孔内地球物理観測点 | 説 明 |
| JTー1(提案名)、1150(ODP掘削地点名) | (日本海溝・地震活動域:390.92'N, 1439.91'E, 水深 2680 m) 位置は日本海溝の陸側で、プレート収束域にもっとも近い長期観測点である。地震研究所の三陸沖地震波観測システムの海底ケーブルがごく近くに存在するので、将来リアルタイル観測への移行は比較的容易である。 |
| JTー2(提案名)、1151(ODP掘削地点名) | (日本海溝・地震低活動域:385.01'N, 1430.04'E, 水深2172 m) 位置は日本海溝の陸側で、1150地点の南にあたるが、地震活動度は低く、プレート間が固着しているか、自由にスリップしているか、地震活動では区別しにくい。 |
| WPー1 | (フィリピン海・西フィリピン海盆:197.85'N, 135.95'E, 水深5640 m) 九州パラオ海嶺の西側の海盆部で、フィリピン海を取り巻く陸上観測点と併せて効率的なネットワークを形成する。沖の鳥島あるいは海底ケーブルが近くに存在するので、将来リアルタイム観測への移行は比較的容易である。 |
| WPー2 | (北西太平洋海盆:41.79'N, 1597.79'E, 水深5548 m) 位置は北西太平洋の古い海洋プレート上である。グローバルなネットワークにも重要な位置であり、かつ海溝型地震を海側で観測するユニークな位置にある。 |
|
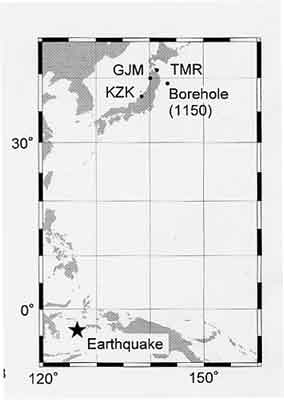
三陸沖に関しては、1999年6~8月の掘削航海(186次航海)により観測点の設置、9月にシステムの起動と観測の開始を、海洋科学技術センターの無人潜水艇を利用して実施した。 三陸沖観測点は、日本海溝の陸側であり、海半球ネットワークの広域観測網の一部となると同時に、プレート運動様式の非一様性、太平洋プレート沈み込み後の挙動などの解明なども目的としている。 三陸沖陸側斜面下の地震活動は一様でなく、活発な所と低いところがあり、これらは、プレート間のカップリングに起因していると考えられる。 三陸沖観測点では、地震活動が活発な地点(1150)と低い地点(1151)の2つの観測点を設置することで、大きく異なると推定される歪蓄積様式を実測する(図1)。 |

|
|
図1 三陸沖孔内地球物理観測点設置位置。 点は、1991年から1993年までの震央の位置を示す。点の濃度は震源の深さ、大きさはマグニチュードを示す。星は、海底孔内観測点の位置を示す。また、四角は、ケーブル式海底地震計の位置、三角は海底津波計を表している。三陸沖海底孔内観測点は地震活動の活発な地点と低活動な地点の2カ所に設置された。 |
|
[三陸沖孔内地球物理観測点のシステム] 観測点全体の概要を図2に示す。センサー群は孔底に設置され、信号はケーブルによって海底に導かれる。海底にはシステムを動作させる電池とデータを記録するレコーダが置かれる。 孔底に設置されるセンサーは、歪計(1150地点では3成分歪計、1151地点は体積歪計)、傾斜計、地震計2タイプである (次表)。 |
| センサー | 説 明 |
| 高性能広帯域地震計(Guralp社CMG-1T) | 直交3成分、帯域360秒〜50Hz |
| 稍広帯域地震計(PMD社2123) | 直交3成分、帯域30秒〜25Hz、CMG-1T地震計のバックアップとして設置 |
| 歪計(Sacks-Evertson型) | 1150地点:水平方向3成分、1151地点:体積歪、感度10-12 |
| 傾斜計(Applied Geomechanics社) | 水平2成分、感度1ナノラジアン |
|
CMG-1T広帯域地震計からの信号は、孔底において24ビットAD変換され、デジタル形式で海底に伝送される。 他のセンサーの出力はアナログ信号として海底に伝送される。掘削孔口である海底には、データ統合ユニット、電池レコーダユニット、短期データ収録ユニットが置かれる (次表)。 |
| 海底部 | 説 明 |
| データ統合ユニット | 24ビットAD変換、刻時、データ統合、センサーの制御、電源の供給 |
| 電池レコーダユニット | 海水を電解液として発電を行う海水電池とデータを記録するデータ記録ユニットからなる。 ・データ記録ユニット 56MBメモリ、72GBハードディスク、赤外線ポート ・海水電池(Simrad社SWB1200 3基) 36V給電、4Ah バッファ、18Wの電力を2年間供給可能 |
| 短期データ収録ユニット | 256MBメモリ、赤外線ポート、ステータスLED、RS232Cポート |
|
アナログ伝送されたセンサーからの信号は、データ統合ユニットでデジタルに変換される。また、データ統合ユニットは、複数のセンサーからの信号を1系統に統合する。その後、データは、シリアル接続により、データ記録ユニットに伝送する。 電力は18Wを2年間供給できる海水電池から供給される。データの回収は、無人潜水艇により、電池レコーダユニットからデータ記録ユニットを取り外し、船上に回収することによって行う。 そのためにデータ記録ユニットは、水中でも脱着可能なコネクタを用いて、接続されている。電池レコーダユニット、データ統合ユニットも接続には水中脱着コネクタを用いており、障害が発生した際には交換修理可能なようになっている。 また、無人潜水艇を用いて、システムの稼働状況のチェック・短期間のデータ回収を行えるように、短期データ収録ユニットも開発した。これは赤外線通信を用いて、海底でデータ記録ユニットとの間でデータ通信を行う。 [設置とシステム起動] 1999年6~8月のODP186次航海にて、海底孔の掘削、センサーの孔底への設置、セメント固定、海底部の設置を行った。 設置手順を図3に示す。 海底掘削孔の深度は、2地点ともに約1kmである。センサー群(図4左)は、直列に4-1/2インチドリルパイプに固定され、孔底に降ろされた後(図4右)、セメントを圧送して固定した。 |


|
| 図4左:設置前のセンサー群。左から3番目のパイプにセンサー(円柱状の耐圧容器に納められている)が取り付けられている。手前からPMD地震計、傾斜計、CMG-1T地震計である。また、歪計は右奥の木箱に入っている。 |
| 図4右:掘削船上で、ドリルパイプに取り付けられ、設置直前のセンサー群。センサーは下から、歪計、PMD地震計、傾斜計、CMG-1T地震計である。 |
| セメントは孔の最下部約150mを埋めている。これはセンサーと孔壁を完全に固着させ、理想的な観測環境を得るために行った。各センサーからの信号を送る中性浮力のケーブルをドリルパイプに沿わせて、データ統合ユニットまで配線する。 データ統合ユニット(図5左)は、ドリルパイプ上部に固定され、海底に設置される。 その後、電池レコーダユニット(図5右)を、掘削船からつながっているドリルパイプに沿って降下させ、海底に設置した。 |


|
| 図5左:掘削船上で設置直前のデータ統合ユニット。下部の4つのコネクタはセンサーからの信号線。また、上部のコネクタは、海底で電池レコーダユニットと接続されるが、この時点では、コネクタが汚れないようにキャッププラグがさしてある。 |
| 図5右:掘削船の中央に開いた穴から、ドリルパイプに沿って降下される電池レコーダユニット。円形上部右手に、データ記録ユニットが設置されているのが見える。黄色の線は、海底でデータ統合ユニットと接続するために用いる。また、白い3つの円形は、海水電池の上部。 |
|
再びTVカメラを降下させ、設置状況を確認した後、ドリルパイプを観測装置上部で切り離し、掘削船での設置は完了した。 センサー・データ統合ユニットと電池レコーダユニットを別々に設置する必要があったために、観測を開始するには、データ統合ユニットと電池レコーダユニットを接続する必要がある。 1999年9月に海洋科学技術センターの無人潜水艇「ドルフィン3K」を用いて、システムの起動を行った。どちらの観測点でも、無人潜水艇を用いた水中脱着コネクタの接続により、電源を投入することができた(図6)。 |


|


|
|
図6 (右上)無人潜水艇によるシステムの起動作業。電池レコーダユニット上部に仮止めされている接続線コネクターを抜き (右下)そのコネクタをデータ統合ユニット上部のコネクタにさすことでシステムが起動する。 (左下)短期データ収録ユニットは、データ記録ユニットの上部に設置することでシステムのチェック、データの回収を行う。 |
|
システムのチェックのために1150地点では、電源投入後、データ記録ユニットの回収を行い、データを回収した。 [データ] システム起動後に1150地点のデータ記録ユニットを回収したことにより、約8時間分の海底孔内での記録が得られた。この中には多数の地震が記録されていたが、例として図7にインドネシアで起こった地震の記録を、陸上で観測された波形と共に示す。 |
|
| 図7 インドネシアで発生した地震の観測波形。震源の深さは33kmで、マグニチュードは4.8である。陸上観測点の波形と比較してある。0.025〜0.05Hzのバンドパスフィルターをかけてある。記録は、水平動成分で、おおよそラジアル成分に対応する。記録中のP、PPなどは、地球標準モデルIASP91から期待される相の走時を表したもの。 |

|
| 海底孔内で得られた記録は陸上で得られている地震記録と遜色がなく、広帯域地震観測点として十分であることがわかった。得られた記録から、孔内観測点での雑微動のスペクトルを求めた(図8)。 |

|
| 図8 三陸沖海底孔内観測点の雑微動のスペクトル。1999年9月5日の4時から2時間分の記録を用いて求めてある。Vが上下動、H1とH2が水平動のノイズスペクトルを示している。図中のHigh Noise ModelとLow Noise Modelは、それぞれ陸上観測点での雑微動が高い観測点と低い観測点における代表的な雑微動のスペクトルを示したもの。脈動に相当する数秒の帯域では、High Noise Modelに近いが、数十秒よりも長い帯域ではLow Noise Modelに近く、良好な観測点であることを示している。 |
|
すべての帯域において、陸上で雑微動が大きいとされる観測点よりも、雑微動は小さい。1~5秒の帯域では脈動の影響を受け、比較的雑微動が大きいが、50秒よりも長い帯域では、静かな陸上観測点に匹敵する低ノイズレベルとなっている。
また、水平動では、100秒あたりでノイズが大きくなっているが、これは海面の重力波の影響を受けていることが明らかにされている(Araki, 2000)。 [今後の計画] 今回設置・観測開始した三陸沖観測点のデータ回収は、2000年の8月に、海洋科学技術センターの無人潜水艇を用いて、行われる予定である。この回収により、1999年9月からの長期間の記録が得られることが期待される。 また、北西太平洋海盆の観測点(WP-2)の設置を、2000年7~9月のODP 191次航海で行い、システムの起動を、海洋科学技術センター無人潜水艇「かいこう」を用いて、2000年11月に行う予定である。 また、フィリピン海の観測点(WP-1)の設置を、ODP195次航海によって、2001年3~4月に行う予定である。これらの航海は、すでに実施が決定されており、設置の準備を進めている。 [おわりに] 海底孔内地球物理複合観測所の設置は、初めての試みであり、設置作業がうまくいくかどうか大変不安であった。しかし、掘削船ジョイデスレゾリューション号乗船科学者・技術者・乗組員の尽力により、問題が発生するたびに乗り越えることができて、設置成功に至った。 準備においても広帯域地震計と収録システムはイギリス、海水電池はノルウェー、歪計および掘削船運航はアメリカと世界中に散らばっており、連絡をとるにも時差の問題、また長距離の機材輸送など多くの障害があった。 また、無人潜水艇による海底での作業も大変心配であったが、海洋科学技術センター「ドルフィン3K」運行チームの卓抜した技量により、順調に行えた。設置が無事に完了し、観測開始に至ったことは大変な感激であると同時に、この計画を支援していただいた国内外の多くの人々に感謝する次第である。 [文献」 Araki, E., Geophysical nature of broadband seismic signals in deep oceans, Ph.D. Thesis, Univ. of Tokyo, 2000. |
| 目次へ |