システム開発研究班(第3班)
(続き)
[海洋島電磁気観測]
前年度までに設置した観測点(ポナペ,キリチマチ,ワンカイヨ,長春,トンガ)における地磁気連続観測を継続して行った。
2000 年 11 月に 南鳥島(マーカス島)、12 月にモンテンルパ(フィリピン)、2001 年 3 月に、マジュロ(マーシャル諸島連邦)における地磁気観測を開始した。それぞれ、気象庁、フィリピン国土地理院 (National Mapping and Resource Information Authority [NAMRIA])、マーシャル諸島エコ社 (Island Eco Inc.) の協力を得て観測装置を設置し、今後の観測も、各機関の協力のもとに行われる。モンテンルパ観測点にはテレメータ用機器を設置した。現地での電話の使用が可能となりしだい、インターネットを経由した、日本からのデータ取得および機器の動作モニターが可能となる。今後は、他の海半球ネットワーク地磁気観測点も、可能なものについては同様のシステムを導入する予定である。
トンガ(2000 年 9 月)、ポナペ(2001 年 3 月)の観測点においては、地磁気絶対測定を実施した。トンガでの測定には、気象庁地磁気観測所の瀧沢氏の協力を得た。
中国東北地方において、電話回線を利用した電位差変動観測を継続して行った。すでに得られているデータを用いて MT 法の解析を行った。また、モデリングによって、地表付近の構造の影響を、定量的に見積もった。この結果をふまえて、さらなる3次元解析を行いつつある。
[海底ケーブル電位差観測]
引き続き、海底ケーブル電位差観測を行った。1999 年 9 月にグアム- ミッドウェイ間ケーブルに起こった問題の解決法について、AT&T および米国の協力研究機関と検討を行ったが、最終的な対応を決定するまでにはいたらず、引き続き検討を行う。解析も継続して行われており、以前より信頼性の高い MT レスポンス曲線が得られている。
[海底地震観測]
前年度までに、海底設置型広帯域地震計(BBOBS)で必要な要素の開発試験が終了したので1999年8月に北西太平洋に第1号機(NWPAC1)を設置し、2000年5月に無事回収した(第2班の記事参照)。1999年度中に設置・回収した三陸沖の孔内観測点直上での2ヶ月間の観測など、本BBOBSのシステムが長期海底観測を行うのに充分信頼できることが確認できた。
これらに加えて、従来の17インチガラス球を使用した短周期センサーの海底地震計との比較観測を2000年4月に相模湾で実施した。BBOBSでは直径65 cmのチタン球を使用しているため海底面からの背が高いこと等により、底層流による雑音が大きい可能性がある。暫定的な結果を見ると、やはり雑音レベルの最大振幅が倍程度あった。センサーの帯域(5秒〜)による制限から長周期側に関しては比較不可能であるが、10 Hz以上の帯域での雑音レベルを下げることは外装デザインの修正により可能と思われる。より本質的な、長周期側での水平動成分の雑音レベル低減については、BBOBS本体又は独立させたセンサー部のみを海底に埋設するか底層流から遮蔽する構造を付加する対策が考えられる。しかし、ROVなどの補助を必要としないで観測を行えるBBOBSの特徴は残せるよう、考慮中である。
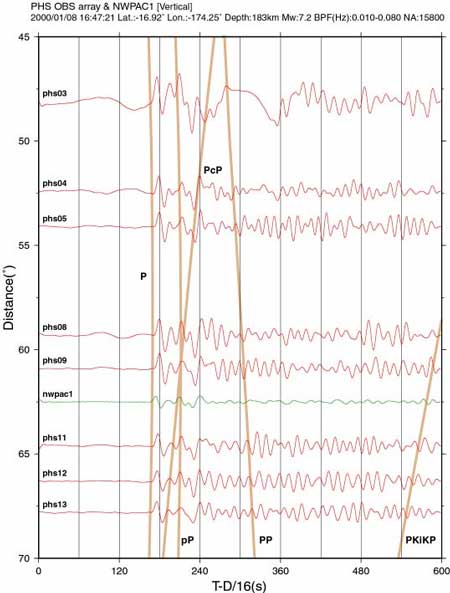
フィリピン海での長期海底地震アレー観測で得られた記録には、一部説明しにくい波形が見受けられる。使用したセンサー(PMD社WB2023LP)に個別添付されたパラメータにより補正すると、同時に観測したBBOBS(NWPAC1)での記録波形との対応は良くなるが、後続波のように続く波群がやはり残る(図1)。これらが同地域の深部構造に依存する可能性はあるが、このセンサーの性質を確認するため、2001年2月に東京大学地震研究所の鋸山観測所で試験観測を行い、この解析は現在進行中である。
 |
|||
| 図1 フィリピン海(PHS)の海底地震観測アレーと北西太平洋のBBOBS(NWPAC1)で捉えたトンガの地震波形。各センサー固有の特性を取り除いた上下動の記録である。高性能な広帯域センサー(Guralp社、CMG-1T)を用いたNWPAC1とPHSの波形を比較すると、初動付近はよく一致するが、PHSには約80秒以降に強い後続波のようなものが見える。 |
|||
[海底地殻変動観測]
GPSを用いた測地観測は、グローバルなプレ−ト運動の速度は一定であるが、プレート境界の地殻変動は間歇的であることを明らかにしている。日本周辺のプレート境界で地殻変動が最も注目されているのは三陸沖の日本海溝であろう。三陸はるか沖地震では、陸上のGPS観測により、地震時の地殻変動とその後の約1年間のゆっくりとした地殻変動が観測されている。陸上の観測結果は、そのような地殻変動は震源に近い海底では1m前後であったことを示唆している(Heki et al., 1997)。ここでは大きな速度をもつ太平洋プレートが東北日本の下に沈み込んでおり、相対的なプレート運動の速度が最も大きい。そのためか、ここでは地震の繰り返し間隔が短く、地震活動が活発である。サイスミックカップリングは比較的小さく、部分的に非地震性のすべりがあると予想されている(Kawasaki et al., 2001)。海底地殻変動観測が最も期待されている場所であるといえよう。この海域における最近の研究によれば、地震活動が活発なところでは、地震学的な観測から滑り速度の分布もある程度推定されるようになってきており(五十嵐, 2001)、海底の観測計画を戦略的に進めることができるようになってきている。
三陸沖の日本海溝における海底地殻変動観測を実現するためには、三つの問題を克服しなければならない。その一つは、海溝軸が陸から約200 kmも離れており、しかもその付近の変動帯の幅も広いということである。二つめの問題は、海底は厚い堆積層に覆われており、海底に穴でも掘らない限り、傾斜観測のような高分解能の測地観測は難しいということである。このような条件で広域の変動を明らかにするための最も有力な観測システムは、長基線のキネマティックGPS海上精密測位と精密音響測距を結合した海底精密測位システムである。三つめは、日本海溝軸は水深7000 m を超える深海底であるという問題である。海底の位置決めを行う音響測距は、水深の1.4倍付近で行うのが最も精度が上がるので、日本海溝軸付近の測位を行うためには、10 km程度の距離における精密測距システムが必要になる。つまり、長基線および深海底で利用できるGPS音響結合方式の海底精密測位システムが必要である。我々は海半球ネットワーク計画において、そのようなシステムの開発をスクリップス海洋研究所と共同で進めてきており、平成12年度でその開発の主要な部分を終えることができた。
12年度の主要な研究課題は三つあった。その一つは、11年度までに開発した深海用精密測距システムを深海において試験し、その性能を確認することである。そこでスクリップス海洋研のファンデフカ沖の航海において、音響測距システムで用いている音波の相関処理法の改良など、基礎的な実験を進めた。11月にはスクリップス海洋研のハワイ島沖航海において、水深4800 mの海底に設置した精密音響トランスポンダーと海上の船との間で、14 kmにもおよぶ長距離において1cmの分解能で音響測距ができることを確認した。つまりこの音響システムを用いれば、水深1万メートルの海底の精密測位も可能である。
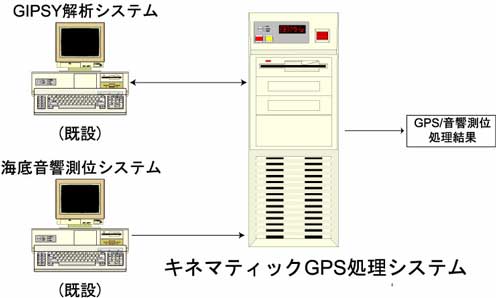
二つめの課題は、長基線のキネマティックGPS測位であり、スクリップス海洋研と共同開発した「キネマティックGPS処理システム」を導入した。本システムは、LinuxをOSとするPCからなる(図2)。GPS音響測位実験で得られるデータのうち、ブイに取り付けた3台のGPSアンテナで得られたGPSデータと陸上の基準点の間の基線解析については、既存の「GIPSY解析システム」が使用され、ブイ上のGPSアンテナの位置が1秒毎に推定される。この解析システムは100 km以上の基線長における実績があり、陸上基準点を複数にすることにより大気遅延補正が向上するので、200 kmを超える基線長にも耐えられると期待されている。これにより、海中のブイ基底部に取り付けられたハイドロフォンの地心座標系における位置が1秒毎に得られることになる。一方前年度までに導入した「海底音響測位システム」により、海底に設置したトランスポンダアレイの各トランスポンダとハイドロフォンの間の音響信号走時が得られる。キネマティックGPS処理システムでは、その走時データからトランスポンダアレイの重心とハイドロフォンの相対位置を推定し、さらに上記の「GIPSY解析システム」の解析結果を統合することにより、地心座標系におけるハイドロフォンアレイの重心位置の推定を行う。
三つめの課題は、日本海溝の陸側斜面の比較的浅海における精密海底測位で用いる簡易型の音響測距システムの開発である。このシステムは水深2-3 kmの海底で用いるものであり、比較的簡単な相関処理で音波の到達を検知するシステムである。このシステム用の精密音響トランスポンダー3台を試験のため相模湾に設置し、精密測位の実験を2回試みた。海況不良のため精密測位はできなかったが、音響測距の分解能は確認できた。
 |
|||
| 図2 キネマティックGPS処理システム | |||
[海底電磁気観測]
平成11年度に東京大学海洋研究所研究船「白鳳丸」のKH99-3次航海のレグ2(シアトル→東京、1999年7月29日〜8月24日)で北西太平洋(北緯41度06.99分、東経159度56.09分、水深5581m)の地点に敷設した「海底電磁気観測所」2号機の回収を、海洋科学技術センターの大型海洋観測船「みらい」のMR00K02航海で試みた。しかし、現場海域では音響トランスポンダーからの応答が得られず、切り離し命令を送出後回収予定海面で待機したが浮上時刻を過ぎても磁力計を発見できなかった為、やむなく入れ替わりに敷設予定であった3号機の投入も見合わせ帰投した。
その後、海洋科学技術センターの協力を得て、12年10月末から11月初めにかけての同センター観測船「かいれい」の航海(横須賀→釧路)で同海域を再訪、「かいれい」搭載の1万メートル級無人海中ロボット「かいこう」により投入点近傍に係留中の「海底電磁気観測所」2号機の発見・回収に成功した。回収した2号機を持ち帰って調査したところ、切り離し用音響トランスポンダーからの電流洩れが自己浮上による回収失敗の原因である事が判明し、急遽既に完成していた1号機・3号機の音響トランスポンダーの調査・改修も行った。改修した3号機は、東京大学海洋研究所「白鳳丸」のKH00-5次航海のレグ2及びレグ3(ペナン→アデン→チェンナイ、2000年12月4日〜2001年1月12日)でアデン湾(北緯14度36.276分、東経52度48.082分、水深1934m)の地点に敷設、3週間後に無事回収できた。尚、2号機は434日間海底で稼働状態にあったが、障害がトランスポンダーからの電流洩れであった為、観測中の電磁場データに大きなノイズが乗り、残念ながら解析に堪えるデータとはならなかった。
[海底熱流量・間隙水圧長期観測]
海底堆積物中の温度分布を長期計測する装置については、前年度の試験結果に基づき、データ記録部と温度プローブを接続する部分の構造を強化した上で、2000年6月に四国沖の水深約1040 mの地点に設置した。2001年1月にデータ記録部の回収を行い、海底面下2 mまでの温度プロファイルを約7か月半にわたり計測することに成功した。観測期間を通して海底水温は激しく変動し(変動幅は最大で1.4 K)、それに応じて堆積物中の温度分布も大きく乱されているが、得られた長期データを解析することにより、地殻熱流量を求めることができるものと考えられる。今後、このシステムを用いて、海底水温変動の大きい浅海域における熱流量測定を進めていく予定である。
また、海底への設置・回収作業を容易にすることを目指して、より小型・軽量化した機器の製作も進めてきた。この小型化した装置を2001年2月に海底に設置し、長期観測を開始した。一方、海底堆積物中の間隙水圧を長期計測する装置については、重錘の切離し部分の構造を改良し、2001年1月に海底に設置した。設置点は、いずれも四国沖の水深1040〜1060 mの地点であり、半年程度の観測を行った後に回収する予定である。